alle kategorier
-
Integrerede kredsløb (IC'er)
Integrerede kredsløb (IC'er)
- Interface - Sensor, Kapacitiv Touch(642)
- Specialiserede IC'er(12302)
- PMIC - Spændingsregulatorer - Særligt formål(5644)
- PMIC - Spændingsregulatorer - Lineære regulatorcontrollere(793)
- PMIC - Spændingsregulatorer - Lineær + Skift(1829)
- PMIC - Spændingsregulatorer - Lineær(70981)
- PMIC - Spændingsregulatorer - DC DC Switching Regulators(39569)
- PMIC - Spændingsregulatorer - DC DC Switching controllere(13507)
- PMIC - Spændingsreference(9453)
- PMIC - V / F og F / V omformere(145)
- PMIC - Termisk styring(592)
- PMIC - Supervisors(47946)
- PMIC - RMS til DC-omformere(170)
- PMIC - Strømforsyningskontrollere, skærme(2104)
- PMIC - Power Over Ethernet (PoE) Controllers(1008)
- PMIC - Power Management - Specialiseret(7722)
- PMIC - Power Distribution Switches, Load Drivers(7706)
- PMIC - PFC (Power Factor Correction)(1222)
- PMIC - ELLER Controllers, Ideal Diodes(705)
- PMIC - Motorchauffører, Controllere(4712)
- PMIC - Belysning, Ballast Controllers(560)
- PMIC - LED-drivere(7282)
- PMIC - Laser drivere(573)
- PMIC - Hot Swap Controllers(2816)
- PMIC - Gate Drivers(7083)
- PMIC - Full, Half-Bridge Drivers(1342)
- PMIC - Energimåling(654)
- PMIC - Skærmdrivere(1435)
- PMIC - Nuværende Regulering / Ledelse(1481)
- PMIC - Batteristyring(5553)
- PMIC - Batteriopladere(3831)
- PMIC - AC DC konvertere, offline switchers(4905)
- Hukommelse - Controllers(358)
- Hukommelse - Konfiguration Proms til FPGA'er(639)
- Hukommelse - Batterier(13)
- Hukommelse(65694)
- Logik - Universal Bus Funktioner(706)
- Logik - Oversættere, Level Shifters(2854)
- Logik - Speciallogik(1870)
- Logiske - Signalafbrydere, Multiplexere, Dekodere(9420)
- Logic - Shift Registers(2665)
- Logik - Paritetsgeneratorer og Checkers(335)
- Logik - Multivibratorer(831)
- Logik - Låse(3658)
- Logik - porte og invertere - multifunktion, konfigurerbar(1687)
- Logik - Gates and Inverters(16453)
- Logik - Flip Flops(7780)
- Logic - FIFOs Memory(4240)
- Logik - Counters, Dividers(3456)
- Logik - Komparatorer(592)
- Logik - Buffere, drivere, modtagere, transceivere(17835)
- Lineær - Videobehandling(2909)
- Lineære - Sammenligninger(5084)
- Lineære - Analog Multiplikatorer, Dividere(263)
- Lineære - forstærkere - Videoforstærkere og moduler(1905)
- Lineær - Forstærkere - Særligt formål(1856)
- Lineære - forstærkere - instrumentering, op ampere, bufferforstærkere(34236)
- Lineær - Forstærkere - Lyd(4567)
- Interface - Voice Record og afspilning(556)
- Interface - UARTS (Universal Asynchronous modtager sender)(1237)
- Interface - Telecom(4467)
- Interface - Specialiseret(4833)
- Interface - Signal Terminatorer(333)
- Interface - Signalbuffere, Gentagere, Splittere(1449)
- Interface - Serializers, Deserializers(1480)
- Interface - Sensor og Detector Interfaces(1524)
- Interface - Moduler(169)
- Interface - Modemer - IC'er og moduler(407)
- Interface - I / O-udvidere(1136)
- Interface - Filtre - Aktiv(1226)
- Interface - Encoders, Decoders, Converters(714)
- Interface - drivere, modtagere, transceivere(20755)
- Interface - Direct Digital Synthesis (DDS)(117)
- Interface - Controllers(3628)
- Interface - CODECs(1676)
- Interface - Analoge switches, multiplexers, Demultiplexers(12567)
- Interface - Analoge Switches - Special Purpose(2533)
- Embedded - System On Chip (SoC)(4496)
- Embedded - PLD'er (Programmerbar Logic Device)(971)
- Embedded - mikroprocessorer(10083)
- Indlejret - mikrokontrollere - applikationsspecifik(2275)
- Embedded - Microcontrollers(99285)
- Indlejret - mikrokontroller, mikroprocessor, FPGA -moduler(1527)
- Embedded - FPGAS (feltprogrammerbar gate array) med mikrokontrollere(81)
- Embedded - FPGAS (Field Programmerbar Gate Array)(27747)
- Embedded - DSP (Digital Signal Processors)(4081)
- Embedded - cplds (komplekse programmerbare logiske enheder)(5187)
- Data Acquisition - Touch Screen Controllers(1210)
- Dataindsamling - Digital til analoge konvertere (DAC)(14419)
- Data Acquisition - Digitale Potentiometre(6250)
- Dataindsamling - Analog til digitale konvertere (ADC)(17776)
- Data Acquisition - Analog Front End (AFE)(787)
- Dataforsamling - ADC'er / DAC'er - Særligt formål(3043)
- Ur / Timing - Realtidsur(2446)
- Ur/timing - programmerbare timere og oscillatorer(23469)
- Ur / Timing - IC Batterier(4)
- Ur / Timing - Delay Lines(1049)
- Ur/timing - urgeneratorer, PLL'er, frekvenssynthesizere(32775)
- Ur / Timing - Urbuffere, drivere(4568)
- Ur / Timing - Anvendelsesspecifik(8652)
- Audio Special Purpose(1564)
Relevant producent







-
Diskrete halvlederprodukter
Diskrete halvlederprodukter
- Aktuel regulering - dioder, transistorer(1090)
- Transistorer - Særligt formål(226)
- Transistorer - Programmerbar Unijunction(48)
- Transistorer - JFET'er(1558)
- Transistorer - IGBT'er - Single(4799)
- Transistorer - IGBT'er - Moduler(63420)
- Transistorer - IGBT'er - Arrays(26)
- Transistorer - FET'er, MOSFET'er - Single(48330)
- Transistorer - FET'er, MOSFET'er - RF(4903)
- Transistorer - FET'er, MOSFET'er - Arrays(6641)
- Transistorer - Bipolar (BJT) - Single, Pre-Biased(4539)
- Transistorer - Bipolar (BJT) - Single(25800)
- Transistorer - Bipolar (BJT) - RF(2087)
- Transistorer - Bipolar (BJT) - Arrays, Pre-Biased(2115)
- Transistorer - Bipolar (BJT) - Arrays(2310)
- Thyristorer - TRIAC'er(4044)
- Thyristorer - SCR'er - Moduler(3967)
- Thyristors - SCRs(5436)
- Thyristorer - DIAC'er, SIDAC'er(319)
- Power Driver Modules(1627)
- Dioder - Zener - Single(87483)
- Dioder - Zener - Arrays(2619)
- Dioder - Variabel kapacitans (varicaps, varaktorer)(1200)
- Dioder - RF(2753)
- Dioder - Rectifiers - Single(67528)
- Dioder - Rectifiers - Arrays(20581)
- Dioder - Bridge Rectifiers(11700)
Relevant producent




-
RF / IF og RFID
RF / IF og RFID
- Abonnentidentifikationsmodul (SIM) kort(77)
- RF -cirkulatorer og isolatorer(1742)
- RFID, RF Access, Monitoring ICs(1550)
- RFID Transponders, Tags(747)
- RFID Reader Moduler(464)
- RFID -evaluerings- og udviklingssæt, bestyrelser(30)
- RFID antenner(329)
- RFI og EMI - afskærmning og absorberende materialer(6444)
- RFI og EMI - Kontakter, Fingerstock og Pakninger(7497)
- RF-sendere(668)
- RF Transceiver Moduler(6900)
- RF Transceiver IC'er(4169)
- RF-switche(9276)
- RF Shields(16401)
- RF-modtagere(1998)
- RF -modtager, sender og transceiver færdige enheder(2763)
- RF Power Dividers / Splitters(1223)
- RF Power Controller IC'er(86)
- RF modulatorer(710)
- RF Mixers(2800)
- RF forskellige IC'er og moduler(3276)
- RF Front End (LNA + PA)(419)
- RF -evaluering og udviklingssæt, bestyrelser(747)
- RF retningskobling(2718)
- RF Diplexere(1464)
- RF-detektorer(412)
- RF Demodulatorer(249)
- RF-antenner(12319)
- RF forstærkere(19651)
- Balun(1496)
- attenuatorer(4852)
Relevant producent







-
Optoelektronik
Optoelektronik
- Optomechanical(480)
- Belysningsarmaturer(125)
- Laserdioder, lasermoduler - Laserlevering, laserfibre(345)
- Hene lasersystemer(31)
- Hene laserhoveder(27)
- Vis baggrundslys(93)
- Xenon Lighting(387)
- Touch Screen Overlays(453)
- Panelindikatorer, Pilotlys(75729)
- Optik - Remote Phosphor Light Source(269)
- Optik - Reflektorer(665)
- Optik - Lysrør(5384)
- Optik - Objektiver(4951)
- LED'er - Spacers, Standoffs(2718)
- LED'er - Lampeskift(29718)
- LED'er - Circuit Board -indikatorer, arrays, lysstænger, søjlediagrammer(9083)
- LED termiske produkter(667)
- LED Belysningssæt(64)
- LED Belysning - Hvid(37580)
- LED Belysning - Farve(4728)
- LED Belysning - COB'er, Motorer, Moduler(28735)
- LED Indikation - Diskret(27601)
- Laser Dioder, Moduler(1553)
- Lamper - Incandescents, Neons(311004)
- Lamper - Cold Cathode Fluorescerende (CCFL) & amp;UV(164)
- Inverters(7728)
- Infrarød, UV, synlige emittere(3871)
- Fiberoptik - sendere - Drivkredsløb integreret(4085)
- Fiberoptik - Sendere - Diskret(350)
- Fiberoptik - Transceiver Moduler(18758)
- Fiberoptik - switches, multiplexers, demultiplexers(1387)
- Fiberoptik - Modtagere(695)
- Fiberoptik - dæmpere(654)
- Electroluminescent(102)
- Display, Monitor - Interface Controller(98)
- Display Moduler - Vakuum Fluorescerende (VFD)(249)
- Display Moduler - LED Dot Matrix og Cluster(865)
- Display Moduler - LED Tegn og Numerisk(5421)
- Display Moduler - LCD, OLED, Grafisk(4654)
- Display Moduler - LCD, OLED Tegn og Numerisk(2202)
- Skærmbjælker, linser(88)
- Adressable, Specialitet(458)
Relevant producent







-
Sensorer, Transducere
Sensorer, Transducere
- Ultralydsmodtagere, sendere - industrielle(115)
- Temperatursensorer - termostater - mekanisk - industriel(3103)
- Temperatursensorer - Analog og digital output - Industriel(209)
- Nærhedssensorer - industrielle(13611)
- Tryksensorer, transducere - industrielle(26503)
- Optiske sensorer - Fotonik - Tællere, detektorer, SPCM (enkelt fotonoptællingsmodul)(751)
- Optiske sensorer - kameramoduler(875)
- Magnetiske sensorer - position, nærhed, hastighed (moduler) - industriel(554)
- Kraftsensorer - industriel(346)
- Flowsensorer - Industriel(151)
- Float, niveau sensorer - industriel(310)
- Kodere - Industrial(4980)
- Farvesensorer - industriel(50)
- Berør sensorer(100)
- Ultralydsmodtagere, Transmittere(2421)
- Temperaturføler - Termostater - Solid State(1096)
- Temperaturføler - Termostater - Mekanisk(3397)
- Temperatursensorer - termoelementer, temperaturprober(1921)
- Temperatursensorer - RTD (Resistens Temperaturdetektor)(1525)
- Temperatur sensorer - PTC termistorer(2273)
- Temperatur sensorer - NTC termistorer(13259)
- Temperaturføler - Analog og digital udgang(3928)
- Strain Gauges(1399)
- Specialiserede sensorer(1861)
- Solceller(503)
- Stødsensorer(84)
- Sensor Interface - Junction Blocks(2519)
- Sensorkabel - Samlinger(22011)
- Nærhed / belysningssensorer - Færdige enheder(725)
- Nærhedsfølere(2860)
- Tryksensorer, transducere(11317)
- Positionssensorer - vinkel, lineær positionsmåling(6022)
- Optiske sensorer - Reflekterende - Logisk udgang(194)
- Optiske sensorer - Reflekterende - Analog udgang(432)
- Optiske sensorer - Fototransistorer(1027)
- Optiske sensorer - PhotoInterrupters - Slot Type - Transistor output(1427)
- Optiske sensorer - PhotoInterrupters - Slot Type - Logic output(1215)
- Optiske sensorer - Fotoelektriske, industrielle(16763)
- Optiske sensorer - fotodioder(1543)
- Optiske sensorer - fotodetektorer - fjernmodtager(2605)
- Optiske sensorer - Foto Detektorer - Logic Output(146)
- Optiske sensorer - Foto Detektorer - CdS celler(74)
- Optiske sensorer - Afstandsmåling(377)
- Optiske sensorer - Ambient Light, IR, UV Sensorer(1305)
- Multifunktions(558)
- Bevægelsessensorer - Vibration(337)
- Bevægelsessensorer - Tilt Switches(67)
- Bevægelsessensorer - Optisk(719)
- Bevægelsessensorer - Inclinometre(175)
- Bevægelsessensorer - IMU'er (inertimåleenheder)(416)
- Bevægelsessensorer - Gyroskoper(214)
- Bevægelsessensorer - Accelerometre(1911)
- Magneter - Sensor Matchet(119)
- Magneter - Multi Purpose(1965)
- Magnetiske sensorer - Switches (Solid State)(3700)
- Magnetiske sensorer - position, nærhed, hastighed (moduler)(5199)
- Magnetiske sensorer - Lineære, Kompas (IC'er)(1247)
- Magnetiske sensorer - kompas, magnetfelt (moduler)(35)
- LVDT -transducere (lineær variabel differentiel transformer)(204)
- IrDA Transceiver Moduler(196)
- Billedsensorer, kamera(2235)
- Fugtighed, fugt sensorer(1425)
- Gas sensorer(1217)
- Force sensorer(188)
- Flowsensorer(550)
- Float, Level Sensors(1343)
- encodere(6357)
- Støvsensorer(43)
- Aktuelle transducere(3455)
- Farvesensorer(85)
- Forstærkere(1905)
Relevant producent







-
Tilslutninger, sammenkoblinger
Tilslutninger, sammenkoblinger
- USB, DVI, HDMI -stik(446)
- Solid State Lighting Connectors(555)
- Stikkontakter til ICS, transistorer(953)
- Pluggbare stik(1221)
- Fotovoltaiske (solcellepanel) stik(136)
- Fiberoptiske stik(370)
- FFC, FPC (flad fleksible) stik(761)
- D-SUB, D-formede stik(2887)
- Coaxial Connectors (RF)(2389)
- Cirkulære stik(14162)
- Blade Type Power Connectors(273)
- Stik og beholdere(2597)
- USB, DVI, HDMI-stik - Adaptere(572)
- USB, DVI, HDMI -stik(4298)
- Terminaler - Wire to Board-stik(217)
- Terminaler - Wire Splice Connectors(4322)
- Terminaler - Wire Pin Connectors(328)
- Terminaler - Turret Connectors(1273)
- Terminaler - Specialiserede stik(2042)
- Terminaler - Spade-stik(3902)
- Terminaler - Lyddæmper(345)
- Terminaler - Skruekoblinger(745)
- Terminaler - Ringstik(12596)
- Terminaler - Rektangulære stik(4747)
- Terminaler - Hurtige forbindelser, hurtige afbrydelsesstik(8514)
- Terminaler - PC Pin, Single Post Connectors(3776)
- Terminaler - PC Pin Holdere, Stikkontakter(5883)
- Terminaler - Magnetiske ledningsstik(1653)
- Terminaler - Knivkontakter(112)
- Terminaler - Huse, Støvler(2850)
- Terminaler - Folie Connectors(108)
- Terminaler - Barrel, Bullet Connectors(1107)
- Terminaler - Adaptere(137)
- Terminal Strips og Turret Boards(1159)
- Terminal Junction Systems(2533)
- Terminalblokke - Wire to Board(43615)
- Terminalblokke - Specialiseret(3722)
- Terminalblokke - Strømfordeling(847)
- Terminalblokke - Panelmontering(1359)
- Terminalblokke - Interface Moduler(1819)
- Terminalblokke - Headers, stik og stikkontakter(119920)
- Terminalblokke - Din Rail, Channel(9373)
- Terminalblokke - Kontakter(65)
- Terminal blokke - Barrier Blocks(47517)
- Terminalblokke - Adaptere(1059)
- Solid State Lighting Connectors - Kontakter(271)
- Solid State Lighting Connectors(1344)
- Stikkontakter til IC'er, Transistorer - Adaptere(275)
- Stikkontakter til ICS, transistorer(22148)
- Shunts, Jumpers(907)
- Rektangulære stik - fjederbelastet(7721)
- Rektangulære stik - Huse(43023)
- Rektangulære stik - Headers, Special Pin(6129)
- Rektangulære stik - overskrifter, beholdere, kvindelige stikkontakter(229601)
- Rektangulære stik - Headers, Male Pins(543338)
- Rektangulære stik - gratis hængende, panelmontering(30142)
- Rektangulære stik - kontakter(10681)
- Rektangulære stik - bord i, direkte ledning til bord(2432)
- Rektangulære stik - Adaptere(475)
- Rektangulær - Board to -brætstik - overskrifter, beholdere, kvindelige stikkontakter(9)
- Rektangulær - Board to -brætstik - overskrifter, mandlige stifter(2)
- Rektangulære stik - bordafstandsstykker, stablere (bord til bord)(238901)
- Rektangulære stik - arrays, kanttype, mezzanin (bord til bord)(37853)
- Strømindgangsstik - indgange, udgange, moduler(10310)
- Pluggbare stik(6049)
- Photovoltaic (Solar Panel) stik - kontakter(77)
- Fotovoltaiske (solcellepanel) stik(504)
- Modulære stik - ledningsblokke(99)
- Modulære stik - stik(1674)
- Modulære stik - stikkabinetter(181)
- Modulære stik - Jacks With Magnetics(10152)
- Modulære stik - Jacks(23416)
- Modulære stik - Adaptere(855)
- Memory Connectors - PC Kort - Adaptere(21)
- Memory Connectors - PC Card Sockets(3299)
- Memory Connectors - Inline Module Sockets(3390)
- LGH-stik(764)
- Keystone - indsatser(2758)
- Keystone - Faceplates, Frames(1926)
- Heavy Duty-stik - indsatser, moduler(4190)
- Heavy Duty Connectors - Huse, Hætter, Baser(17226)
- Heavy Duty Connectors - Rammer(523)
- Heavy Duty Connectors - Kontakter(1832)
- Heavy Duty Connectors - Assemblies(671)
- Fiberoptiske stik - Huse(919)
- Fiberoptiske stik - Adaptere(4455)
- Fiberoptiske stik(3001)
- FFC, FPC (Flat Flexible) Tilslutninger - Huse(652)
- FFC, FPC (Flat Flexible) stik - kontakter(202)
- FFC, FPC (flad fleksible) stik(18691)
- D-Sub, D-Shaped Connectors - Terminatorer(47)
- D-Sub, D-formede stik - Huse(12238)
- D-Sub, D-Shaped Connectors - Kontakter(2714)
- D-Sub, D-formede stik - Backshells, Hoods(5995)
- D-Sub, D-formede stik - Adaptere(1304)
- D-Sub-stik(141346)
- D-formede stik - Centronics(8770)
- Kontakter, fjederbelastet og tryk(630)
- Kontakter - Multi Purpose(6196)
- Kontakter - Leadframe(122)
- Koaksialkontakter (RF) - Terminatorer(1231)
- Koaksialkontakter (RF) - Kontakter(480)
- Koaksiale stik (RF) - Adaptere(6386)
- Coaxial Connectors (RF)(25734)
- Cirkulære stik - Huse(441226)
- Cirkulære stik - kontakter(4737)
- Cirkulære stik - Backshells og kabelklemmer(53692)
- Cirkulære stik - Adaptere(8839)
- Cirkulære stik(1196254)
- Card Edge Connectors - Huse(469)
- Card Edge Connectors - Edgeboard-stik(672683)
- Card Edge Connectors - Kontakter(325)
- Card Edge Connectors - Adaptere(73)
- Blade Type Power Connectors - Huse(837)
- Blade Type Power Connectors - Kontakter(393)
- Blade Type Power Connectors(4163)
- Mellem serie adaptere(649)
- Tønde - Strømforbindelser(935)
- Tønde - Audio-stik(2432)
- Tønde - Lydadaptere(92)
- Banan og Tip Connectors - Jacks, stik(1644)
- Banan- og tipkontakter - bindende indlæg(239)
- Banan- og Tip-stik - Adaptere(75)
- Backplane Connectors - Specialiseret(45586)
- Backplane Connectors - Huse(6863)
- Backplane Connectors - Hård Metrisk, Standard(6297)
- Backplane-stik - DIN 41612(9408)
- Backplane Connectors - Kontakter(3583)
- Backplane Connectors - ARINC Inserts(2357)
- Backplane Connectors - ARINC(3789)
Relevant producent







-
modstande
-
kondensatorer
kondensatorer
- Aluminiumelektrolytkondensatorer(16817)
- Trimmere, Variable Kondensatorer(3151)
- Tynde filmkondensatorer(3473)
- Tantalkondensatorer(136103)
- Tantal - Polymerkondensatorer(9778)
- Silicon kondensatorer(320)
- Niobiumoxidkondensatorer(330)
- Glimmer og PTFE kondensatorer(9101)
- Filmkondensatorer(150406)
- Elektriske dobbeltlags kondensatorer (EDLC), superkapacitorer(2782)
- Keramiske kondensatorer(833829)
- Capacitor Networks, Arrays(2383)
- Aluminiumelektrolytkondensatorer(125325)
- Aluminium - Polymerkondensatorer(7544)
Relevant producent






-
transformers
-
isolatorer
-
Krystaller, oscillatorer, resonatorer
-
Skifter
Skifter
- Samlåsekontakter(2893)
- Emergency Stop (E-STOP) switches(1160)
- Kabelstikkontakter(571)
- Toggle Switches(33608)
- Thumbwheel Switches(742)
- Taktile kontakter(14263)
- Snap Action, Limit Switches(28077)
- Slide Switches(5166)
- Vælgerkontakter(9720)
- Rotary Switches(13850)
- Rocker Switches(53790)
- Pushbutton Switches - Hall Effect(127)
- Trykknapper(190826)
- Programmerbare skærmkontakter(39)
- Navigationsafbrydere, joystick(1882)
- Magnetiske, Reed Switches(1399)
- Tastaturkontakter(637)
- Tastelåsskiftere(3684)
- DIP-switche(7747)
- Konfigurerbare Switch Komponenter - Lens(1435)
- Konfigurerbare switchkomponenter - belysningskilde(1236)
- Konfigurerbare switch komponenter - Kontakt blok(1401)
- Konfigurerbare Switch Komponenter - Body(16077)
- Afbryd forbindelseskomponenterne(2567)
Relevant producent






-
Relæer
Relæer
- Sikkerhedsrelæer(1310)
- Reed Relays(1735)
- Højfrekvente (RF) relæer(1190)
- Contactors (Solid State)(686)
- Kontaktorer (Elektromekaniske)(11952)
- Automotive Relæer(1881)
- Solid State Relæer(10652)
- Signalrelæer, op til 2 ampere(9149)
- Relæ Sockets(2075)
- Power relæer, over 2 ampere(31604)
- I / O-relæmoduler(712)
- I / O-relæmoduler - Input(2)
- I / O-relæmodulstativ(247)
Relevant producent





























Vælg sprog
Nuværende sprog
Dansk
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
L298 Motor Driver IC Arbejdprincippet, Kredsløb, & Datablad
Tid: 2026-06-25
Gennemse: 179
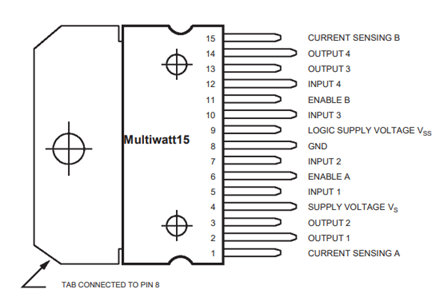
L298 er en dual full-bridge motor driver IC, der er designet til at kontrollere DC motorer, bipolare stepper motorer og andre induktive belastninger. L298 fås i flere pakkeversioner, hvor L298N er den mest anvendte. "N" betegnelsen henviser til Multiwatt-15-pakken, der er designet til højere effektbehandling og nem montering af kølelegeme. Denne artikel forklarer, hvordan L298 fungerer, dens pin funktioner, elektriske specifikationer, understøttede motortyper, typiske kredsløb, sammenligning med moderne motor drivere og almindelige anvendelser.

Katalog
Hvordan L298 Motor Driver fungerer
L298 kontrollerer DC motorer og stepper motorer ved hjælp af to uafhængige H-bro kredsløb, mærket Kanal A og Kanal B i blokdiagrammet. Hver H-bro modtager logiske signaler fra input pins og skifter det interne transistor netværk for at kontrollere retningen af strømmen, der flyder gennem motoren.
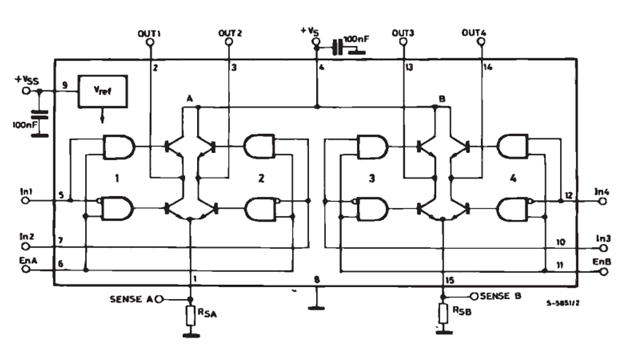
Som vist i blokdiagrammet kontrollerer IN1 og IN2 Kanal A, mens IN3 og IN4 kontrollerer Kanal B. Når det ene input er HØJT og det andet er LAVT, skaber H-broen en strømvej gennem motoren, hvilket får den til at rotere. At vende inputtilstandene vender strømflowet og ændrer motorens rotationsretning.
ENA og ENB pins aktiverer eller deaktiverer hver H-bro. Disse pins styres normalt af et PWM signal fra en mikrokontroller. Ved at justere PWM-duty-cyklussen ændres den gennemsnitlige spænding, der påføres motoren, hvilket muliggør hastighedskontrol.
Motorens strøm leveres gennem +Vs pin, mens den interne logik fungerer fra +Vss. SENSE A og SENSE B pins kan forbindes til eksterne modstande for at overvåge motorstrømmen til beskyttelses- eller kontrolformål.
L298 Pinout og Pin Funktioner
| Pin Nr. |
Pin Navn |
Funktion |
| 1 |
Sense A |
Strøm sensing forbindelse for Kanal A. Typisk tilsluttet en lavværdi modstand for strøm overvågning. |
| 2 |
OUT1 |
Udgangsterminal 1 af H-Bro A tilsluttet motoren. |
| 3 |
OUT2 |
Udgangsterminal 2 af H-Bro A tilsluttet motoren. |
| 4 |
Vs |
Motor power forsyningsspænding input. Leverer strøm til udgangsstadiet. |
| 5 |
IN1 |
Logisk kontrol input 1 for H-Bro A. Arbejder sammen med IN2 for at kontrollere motorretning. |
| 6 |
ENA |
Aktiveringsinput for H-Bro A. Bruges til at aktivere/deaktivere kanalen og til PWM hastighedskontrol. |
| 7 |
IN2 |
Logisk kontrol input 2 for H-Bro A. Arbejder sammen med IN1 for at kontrollere motorretning. |
| 8 |
GND |
Jord forbindelse for både logik og strømkredsløb. Metalpladen er også tilsluttet denne pin. |
| 9 |
Vss |
Logisk forsynings spænding input, typisk 5 V. Forsyner den interne kontrol kredsløb. |
| 10 |
IN3 |
Logisk kontrol input 1 til H-Bridge B. Arbejder med IN4 for at styre motorretning. |
| 11 |
ENB |
Aktiver input til H-Bridge B. Bruges til at aktivere/deaktivere kanalen og til PWM hastighedskontrol. |
| 12 |
IN4 |
Logisk kontrol input 2 til H-Bridge B. Arbejder med IN3 for at styre motorretning. |
| 13 |
OUT3 |
Udtags terminal 1 af H-Bridge B tilsluttet motoren. |
| 14 |
OUT4 |
Udtags terminal 2 af H-Bridge B tilsluttet motoren. |
| 15 |
Sense B |
Strømfølsom forbindelse for Kanal B. Typisk tilsluttet en lavværdiresistor til strømmåling. |
Nøgle elektriske specifikationer for L298
| Specifikation |
Værdi |
Enhed |
| Motorforsynings- spænding (Vs) |
Op til 46 (50 V absolut maksimum) |
V |
| Logikforsynings- spænding (Vss) |
4.5 til 7 (5 V typisk) |
V |
| Logik input- spænding (HØJ) |
≥ 2.3 |
V |
| Logik input- spænding (LAV) |
≤ 1.5 |
V |
| Kontinuerlig udgangsstrøm (Per kanal) |
2 |
A |
| Gentagen toppunkt udgangsstrøm |
2.5 |
A |
| Ikke-gentagen toppunkt udgangsstrøm |
3 |
A |
| Total effekt dissipering |
25 |
W |
| Stille strømforsyning strøm (Vs) |
13–70 |
mA |
| Stille strømforsyning strøm (Vss) |
6–36 |
mA |
| Strømfølsom spændingsområde |
-1 til 2.3 |
V |
| Udtags spændings- fald (1 A belastning) |
1.8–3.2 |
V |
| Udtags spændings- fald (2 A belastning) |
4.9 maks |
V |
| Kilde mætning spænding (1 A) |
1.35 typisk |
V |
| Kilde mætning spænding (2 A) |
2.0 typisk |
V |
| Synk mætning spænding (1 A) |
1.2 typisk |
V |
| Synk mætning spænding (2 A) |
1.7 typisk |
V |
| Maksimal kommuteringsfrekvens |
25–40 |
kHz |
| Kilde tænding forsinkelse |
2 |
µs |
| Kilde slukning forsinkelse |
1.5 |
µs |
| Kilde stigningstid |
0.7 |
µs |
| Kilde faldtid |
0.2 |
µs |
| Synk tænding forsinkelse |
1.6 |
µs |
| Synk slukning forsinkelse |
0.7 |
µs |
| Synk stigningstid |
0.2 |
µs |
| Synk faldtid |
0.25 |
µs |
| Driftstemperatur- område |
-25 til +130 |
°C |
| Opbevaringstemperatur- område |
-40 til +150 |
°C |
Hvilke motorer kan L298 køre?
L298 er designet til at drive en række systemer baseret på børstede motorer ved hjælp af sin dobbelte H-bro-arkitektur. Hver H-bro kan uafhængigt styre retning og hastighed af en tilsluttet belastning, hvilket gør det muligt for IC'en at drive to DC motorer samtidig eller en enkelt bipolar stepper motor.
Børstede DC motorer
Børstede DC motorer er de mest almindelige motorer, der drives af L298. IC'en kan kontrollere både rotationsretning og hastighed af en DC motor ved at skifte strømflowet gennem sine H-bro-udgange. En enkelt L298 kan drive en større DC motor ved hjælp af en kanal eller to separate DC motorer ved at udnytte begge H-bro-kanaler.
Bipolar stepper motorer
L298 kan drive 2-fase bipolar stepper motorer ved at bruge sine to H-bro-kanaler til at styre motorens to viklinger. Ved at energisere viklingerne i en specifik sekvens roterer motoren i præcise vinkeltrin i stedet for kontinuerlig rotation. Dette muliggør præcis kontrol af position, hastighed og bevægelsesretning.
Lineære aktuatorer og små robotiske aktuatorer
Mange DC lineære aktuatorer bruger en intern børstet DC motor, hvilket gør dem kompatible med L298. Ved at kontrollere motorretningen gennem H-broen kan aktuatoren forlænges eller trækkes tilbage efter behov. Dette gør L298 nyttig til applikationer som automatiserede døre, justerbare platforme, ventiler og enkle industrielle kontrolsystemer.
Typiske L298 applikationskredsløb
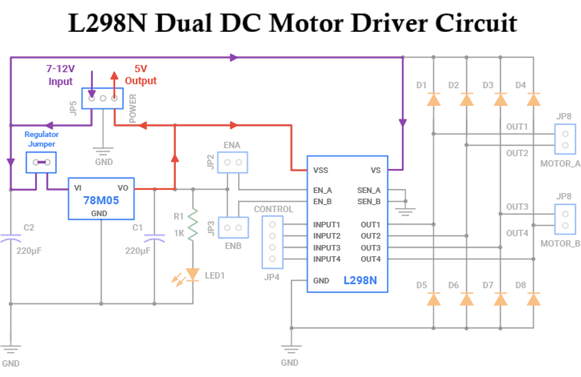
L298N dual DC motor driver kredsløb
Kredsløbet bruger L298N IC'en til at styre to DC motorer. En 7–12V strømforsyning driver motorerne gennem VS-pinden, mens 78M05 regulatoren konverterer denne input til 5V til L298N logiksektionen gennem VSS-pinden.
L298N indeholder to interne H-bro kredsløb. Disse tillader strøm at flyde gennem hver motor i begge retninger, så motorerne kan rotere fremad eller bagud. OUT1 og OUT2 kontrollerer Motor A, mens OUT3 og OUT4 kontrollerer Motor B.
Indgangsbenene INPUT1 til INPUT4 modtager signaler fra en mikrocontroller. Disse signaler bestemmer motorens retning. ENA- og ENB-benene aktiverer hver motor kanal og kan også modtage PWM-signal til at kontrollere motorspeed.
Kondensatorerne hjælper med at stabilisere strømkilden, mens dioderne beskytter IC'en mod back-EMF spændingsspidser produceret af motorerne. Samlet set tillader dette kredsløb en lav-effekt controller at kunne drive og kontrollere to DC motorer sikkert.
Bipolar Stepper Motor Driver Circuit Using L297 and L298
Dette kredsløb kombinerer L297 stepper motorcontrolleren og L298N dual H-bro motor driver til at kontrollere en to-fase bipolar stepper motor. L297 genererer den rette fase sekvens, der er nødvendig for stepper motor drift, mens L298N leverer den højere strøm, der kræves for at drive motorviklingerne.
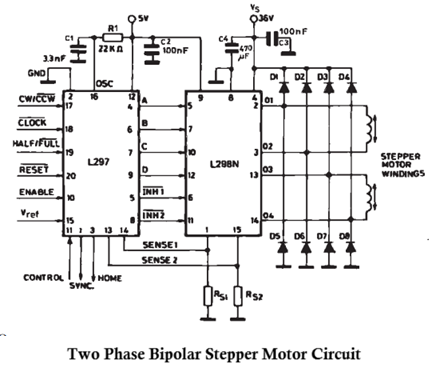
L297 modtager kontrolsignaler som CLOCK, CW/CCW, HALF/FULL, RESET og ENABLE. Baseret på disse indgange genererer den fire udgangssignaler (A, B, C og D), der bestemmer step-sekvensen. CLOCK-indgangen kontrollerer stepping hastigheden, mens CW/CCW-indgangen vælger rotationsretningen. HALF/FULL-indgangen tillader motoren at fungere i enten half-step eller full-step tilstand.
Udgangssignalerne fra L297 er tilsluttet indgangsbenene på L298N. L298N fungerer som en dual H-bro driver, der skifter strøm gennem de to motorviklinger. Ved at energisere viklingerne i den rette sekvens roterer motoren et skridt ad gangen med præcis positionskontrol.
Modstandene RS1 og RS2 tilsluttet SENSE-benene er strømfølsomme modstande. De tillader L297 at overvåge motorkraft og implementere strømregulering gennem sin interne chopper kontrolfunktion. Dette hjælper med at forhindre overdreven strøm og forbedrer motorens effektivitet.
Dioderne D1–D8 er flyback dioder, der beskytter L298N mod spændingsspidser genereret af de induktive motorviklinger. Kondensatorerne nær strømkilden hjælper med at filtrere støj og stabilisere drifts spændingen.
L298 vs Modern Motor Driver ICs
| Data |
L298 |
L293D |
TB6612FNG |
DRV8833 |
BTS7960 |
| Driver Type |
Bipolar transistor |
Bipolar transistor |
MOSFET |
MOSFET |
MOSFET |
| Motor Channels |
2 DC motorer |
2 DC motorer |
2 DC motorer |
2 DC motorer |
1 DC motor |
| Kontinuerlig strøm |
2A/kanal |
600mA/kanal |
1.2A/kanal |
1.5A/kanal |
43A |
| Peak strøm |
3A |
1.2A |
3.2A |
2A |
43A+ |
| Motor spænding |
Op til 46V |
Op til 36V |
Op til 13.5V |
2.7V–10.8V |
Op til 27V |
| Logik spænding |
5V |
5V |
2.7V–5.5V |
2.7V–7V |
3.3V–5V |
| Beskyttelsesdioder |
Ekstern krævet |
Indbygget |
Indbygget |
Indbygget |
Indbygget |
| Hovedbrug |
Mellemliggende DC motorer |
Små DC motorer |
Små robotter |
Lavspændings robotter |
Højstrøm DC motorer |
Common Applications of the L298
Bürsted DC Motor Kontrol
L298 bruges almindeligvis til at drive en eller to Bürsted DC motorer. Det kan ændre motorens retning ved at vende strømflowet og kontrollere motorspeed ved hjælp af PWM-signaler fra en mikrocontroller.
Bipolar Stepper Motor Kontrol
L298 kan drive en to-fase bipolar stepper motor ved at forsyne strøm til dens viklinger i den korrekte sekvens. For lettere step kontrol bruges den ofte med en L297 controller.
Uddannelsesmæssig Robotik
L298 bruges bredt i robot sæt og student projekter, fordi det er nemt at tilslutte til Arduino og andre mikrocontrollere. Det hjælper eleverne med at forstå motor retning kontrol, hastighed kontrol, og H-bro drift.
Små Automationssystemer
L298 kan kontrollere motorer i simple automatiserede systemer såsom små transportbånd, glidende mekanismer og motoriserede platforme. Det er nyttigt, når et projekt har brug for fremad- og bagudgående bevægelse.
Positionering Mekanismer
L298 kan bruges i kamera panorering og vippe-systemer, små CNC-akser og andre positioneringsenheder. I disse applikationer driver den DC-motorer eller steppermotorer for at flytte en belastning til en ønsket position.
Prototype Motor Driver Kredsløb
Ingeniører og entusiaster bruger L298 i prototype kredsløb, fordi det er nemt at teste, bredt tilgængeligt og understøtter separate logik- og motorkilder. Dette gør det nyttigt til tidlige motorstyringsdesign eksperimenter.
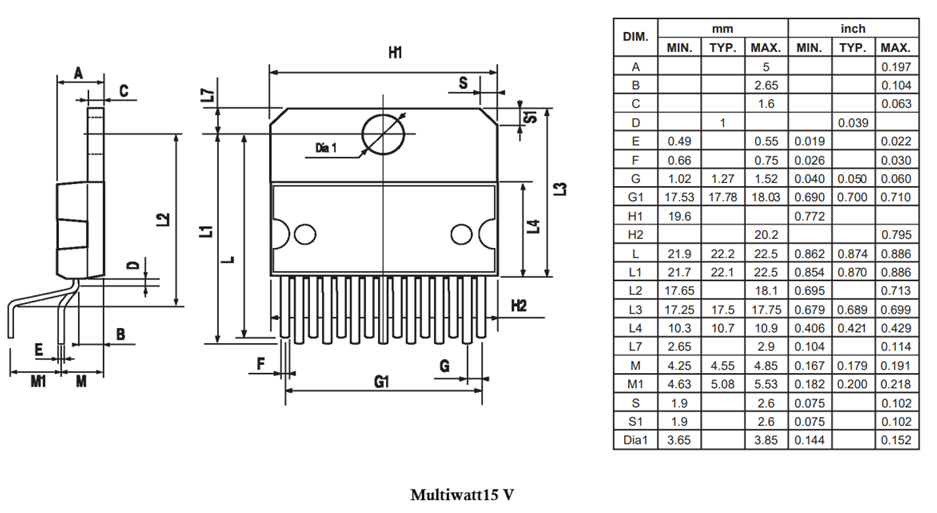
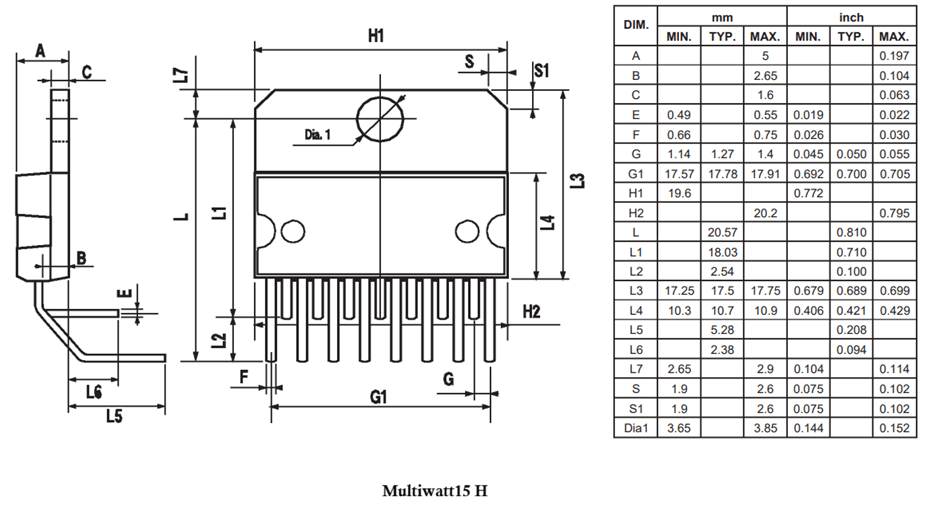
Mekaniske Dimensioner
Konklusion
L298 dual full-bridge driver IC dual H-bro design gør det fleksibelt nok til at kontrollere to børstede DC-motorer eller en bipolar steppermotor, mens dens aktiveringsben tillader simpel hastighedskontrol gennem PWM. Selvom nyere MOSFET-baserede drivere er mere effektive, mindre og koldere, er L298 stadig nyttig, fordi den er nem at forstå, bredt tilgængelig og egnet til undervisningsrobotik, prototyper, små automatiseringssystemer og generelle motorstyringskredsløb.
Ofte Stillede Spørgsmål [FAQ]
1. Hvorfor kræver L298 en separat logikforsyning (Vss) og motorforsyning (Vs)?
L298 adskiller logik- og motorkraftsektionerne for at forbedre pålideligheden. Logikforsyningen forsyner den interne kontrolkredsløb, mens motorforsyningen forsyner H-bro udgangene. Dette forhindrer motor spændingsudsving og elektrisk støj i at forstyrre kontrolsignalerne.
2. Hvorfor genererer L298 mere varme end moderne motor driver IC'er?
L298 bruger bipolar transistor teknologi, som har et højere spændingsfald over udgangstrinnet. Dette får mere energi til at blive omdannet til varme. Moderne MOSFET-baserede drivere har lavere tab og arbejder derfor mere effektivt.
3. Hvordan fungerer PWM hastighedskontrol med L298?
PWM skifter hurtigt ENA eller ENB benet til og fra. Ved at ændre arbejdscyklussen for PWM-signalet ændres den gennemsnitlige spænding, der leveres til motoren, hvilket muliggør en jævn hastighedskontrol uden at ændre forsyningsspændingen.
4. Hvorfor er strøm-sensor ben inkluderet i L298?
Sense A og Sense B benene tillader eksterne modstande at måle motor strøm. Denne funktion kan bruges til overstrømsbeskyttelse, strømbegrænsning, motorovervågning og lukkede kredsløbs motorstyringssystemer.
5. Hvilke faktorer bestemmer, om en motor er egnet til L298?
De vigtigste faktorer er motor spænding, kontinuerlig strøm, opstartstrøm og staldstrøm. Motorens strømkrav skal forblive inden for L298's driftsgrænser for at undgå overophedning eller skade.
6. Kan L298 bruges i batteridrevne enheder?
Ja, men det er ikke altid det mest effektive valg. På grund af sine højere effekt tab forbruger L298 mere energi end MOSFET-baserede drivere, hvilket kan reducere batterilevetiden i bærbare applikationer.
7. Hvorfor er flyback dioder vigtige i L298 motor kredsløb?
Motorer er induktive belastninger, der genererer spændingsspidser, når strømmen pludselig ændres. Flyback dioder omdirigerer sikkert denne energi og beskytter L298 mod potentielt skadelige back-EMF spændinger.
Relateret artikel
-
![Apple M1 Ultra-arkitektur, ydeevne og UltraFusion-teknologi]() Jun 25 2026
Jun 25 2026

relaterede produkter

GRJ32ER71K475KE11L
CAP CER 4.7UF 80V X7R 1210

GRM033R61C153KE84J
CAP CER 0.015UF 16V X5R 0201

UMK105CG070CV-F
CAP CER 7PF 50V C0G/NP0 0402

ADCMP609BRMZ
IC COMPARATOR 1 GEN PUR 8MSOP

LP38693MP-3.3/NOPB
IC REG LIN 3.3V 500MA SOT223-5

VI-710061
IGBT Modules

BCM3020KPF
BROADCO QFP

AM29F200BT-90SD
AM29F200BT-90SD AMD

T491A155K010AH4818
CAP TANT 1.5UF 10% 10V 1206

LT3491CS8#PBF
LT3491CS8#PBF LT

ST26C31CF
ST26C31CF EXAR
RS8802-004B
KRS QFP

SN104961PJPG4
TI QFP