alle kategorier
-
Integrerede kredsløb (IC'er)
Integrerede kredsløb (IC'er)
- Interface - Sensor, Kapacitiv Touch(642)
- Specialiserede IC'er(12302)
- PMIC - Spændingsregulatorer - Særligt formål(5644)
- PMIC - Spændingsregulatorer - Lineære regulatorcontrollere(793)
- PMIC - Spændingsregulatorer - Lineær + Skift(1829)
- PMIC - Spændingsregulatorer - Lineær(70981)
- PMIC - Spændingsregulatorer - DC DC Switching Regulators(39569)
- PMIC - Spændingsregulatorer - DC DC Switching controllere(13507)
- PMIC - Spændingsreference(9453)
- PMIC - V / F og F / V omformere(145)
- PMIC - Termisk styring(592)
- PMIC - Supervisors(47946)
- PMIC - RMS til DC-omformere(170)
- PMIC - Strømforsyningskontrollere, skærme(2104)
- PMIC - Power Over Ethernet (PoE) Controllers(1008)
- PMIC - Power Management - Specialiseret(7722)
- PMIC - Power Distribution Switches, Load Drivers(7706)
- PMIC - PFC (Power Factor Correction)(1222)
- PMIC - ELLER Controllers, Ideal Diodes(705)
- PMIC - Motorchauffører, Controllere(4712)
- PMIC - Belysning, Ballast Controllers(560)
- PMIC - LED-drivere(7282)
- PMIC - Laser drivere(573)
- PMIC - Hot Swap Controllers(2816)
- PMIC - Gate Drivers(7083)
- PMIC - Full, Half-Bridge Drivers(1342)
- PMIC - Energimåling(654)
- PMIC - Skærmdrivere(1435)
- PMIC - Nuværende Regulering / Ledelse(1481)
- PMIC - Batteristyring(5553)
- PMIC - Batteriopladere(3831)
- PMIC - AC DC konvertere, offline switchers(4905)
- Hukommelse - Controllers(358)
- Hukommelse - Konfiguration Proms til FPGA'er(639)
- Hukommelse - Batterier(13)
- Hukommelse(65694)
- Logik - Universal Bus Funktioner(706)
- Logik - Oversættere, Level Shifters(2854)
- Logik - Speciallogik(1870)
- Logiske - Signalafbrydere, Multiplexere, Dekodere(9420)
- Logic - Shift Registers(2665)
- Logik - Paritetsgeneratorer og Checkers(335)
- Logik - Multivibratorer(831)
- Logik - Låse(3658)
- Logik - porte og invertere - multifunktion, konfigurerbar(1687)
- Logik - Gates and Inverters(16453)
- Logik - Flip Flops(7780)
- Logic - FIFOs Memory(4240)
- Logik - Counters, Dividers(3456)
- Logik - Komparatorer(592)
- Logik - Buffere, drivere, modtagere, transceivere(17835)
- Lineær - Videobehandling(2909)
- Lineære - Sammenligninger(5084)
- Lineære - Analog Multiplikatorer, Dividere(263)
- Lineære - forstærkere - Videoforstærkere og moduler(1905)
- Lineær - Forstærkere - Særligt formål(1856)
- Lineære - forstærkere - instrumentering, op ampere, bufferforstærkere(34236)
- Lineær - Forstærkere - Lyd(4567)
- Interface - Voice Record og afspilning(556)
- Interface - UARTS (Universal Asynchronous modtager sender)(1237)
- Interface - Telecom(4467)
- Interface - Specialiseret(4833)
- Interface - Signal Terminatorer(333)
- Interface - Signalbuffere, Gentagere, Splittere(1449)
- Interface - Serializers, Deserializers(1480)
- Interface - Sensor og Detector Interfaces(1524)
- Interface - Moduler(169)
- Interface - Modemer - IC'er og moduler(407)
- Interface - I / O-udvidere(1136)
- Interface - Filtre - Aktiv(1226)
- Interface - Encoders, Decoders, Converters(714)
- Interface - drivere, modtagere, transceivere(20755)
- Interface - Direct Digital Synthesis (DDS)(117)
- Interface - Controllers(3628)
- Interface - CODECs(1676)
- Interface - Analoge switches, multiplexers, Demultiplexers(12567)
- Interface - Analoge Switches - Special Purpose(2533)
- Embedded - System On Chip (SoC)(4496)
- Embedded - PLD'er (Programmerbar Logic Device)(971)
- Embedded - mikroprocessorer(10083)
- Indlejret - mikrokontrollere - applikationsspecifik(2275)
- Embedded - Microcontrollers(99285)
- Indlejret - mikrokontroller, mikroprocessor, FPGA -moduler(1527)
- Embedded - FPGAS (feltprogrammerbar gate array) med mikrokontrollere(81)
- Embedded - FPGAS (Field Programmerbar Gate Array)(27747)
- Embedded - DSP (Digital Signal Processors)(4081)
- Embedded - cplds (komplekse programmerbare logiske enheder)(5187)
- Data Acquisition - Touch Screen Controllers(1210)
- Dataindsamling - Digital til analoge konvertere (DAC)(14419)
- Data Acquisition - Digitale Potentiometre(6250)
- Dataindsamling - Analog til digitale konvertere (ADC)(17776)
- Data Acquisition - Analog Front End (AFE)(787)
- Dataforsamling - ADC'er / DAC'er - Særligt formål(3043)
- Ur / Timing - Realtidsur(2446)
- Ur/timing - programmerbare timere og oscillatorer(23469)
- Ur / Timing - IC Batterier(4)
- Ur / Timing - Delay Lines(1049)
- Ur/timing - urgeneratorer, PLL'er, frekvenssynthesizere(32775)
- Ur / Timing - Urbuffere, drivere(4568)
- Ur / Timing - Anvendelsesspecifik(8652)
- Audio Special Purpose(1564)
Relevant producent







-
Diskrete halvlederprodukter
Diskrete halvlederprodukter
- Aktuel regulering - dioder, transistorer(1090)
- Transistorer - Særligt formål(226)
- Transistorer - Programmerbar Unijunction(48)
- Transistorer - JFET'er(1558)
- Transistorer - IGBT'er - Single(4799)
- Transistorer - IGBT'er - Moduler(63420)
- Transistorer - IGBT'er - Arrays(26)
- Transistorer - FET'er, MOSFET'er - Single(48330)
- Transistorer - FET'er, MOSFET'er - RF(4903)
- Transistorer - FET'er, MOSFET'er - Arrays(6641)
- Transistorer - Bipolar (BJT) - Single, Pre-Biased(4539)
- Transistorer - Bipolar (BJT) - Single(25800)
- Transistorer - Bipolar (BJT) - RF(2087)
- Transistorer - Bipolar (BJT) - Arrays, Pre-Biased(2115)
- Transistorer - Bipolar (BJT) - Arrays(2310)
- Thyristorer - TRIAC'er(4044)
- Thyristorer - SCR'er - Moduler(3967)
- Thyristors - SCRs(5436)
- Thyristorer - DIAC'er, SIDAC'er(319)
- Power Driver Modules(1627)
- Dioder - Zener - Single(87483)
- Dioder - Zener - Arrays(2619)
- Dioder - Variabel kapacitans (varicaps, varaktorer)(1200)
- Dioder - RF(2753)
- Dioder - Rectifiers - Single(67528)
- Dioder - Rectifiers - Arrays(20581)
- Dioder - Bridge Rectifiers(11700)
Relevant producent




-
RF / IF og RFID
RF / IF og RFID
- Abonnentidentifikationsmodul (SIM) kort(77)
- RF -cirkulatorer og isolatorer(1742)
- RFID, RF Access, Monitoring ICs(1550)
- RFID Transponders, Tags(747)
- RFID Reader Moduler(464)
- RFID -evaluerings- og udviklingssæt, bestyrelser(30)
- RFID antenner(329)
- RFI og EMI - afskærmning og absorberende materialer(6444)
- RFI og EMI - Kontakter, Fingerstock og Pakninger(7497)
- RF-sendere(668)
- RF Transceiver Moduler(6900)
- RF Transceiver IC'er(4169)
- RF-switche(9276)
- RF Shields(16401)
- RF-modtagere(1998)
- RF -modtager, sender og transceiver færdige enheder(2763)
- RF Power Dividers / Splitters(1223)
- RF Power Controller IC'er(86)
- RF modulatorer(710)
- RF Mixers(2800)
- RF forskellige IC'er og moduler(3276)
- RF Front End (LNA + PA)(419)
- RF -evaluering og udviklingssæt, bestyrelser(747)
- RF retningskobling(2718)
- RF Diplexere(1464)
- RF-detektorer(412)
- RF Demodulatorer(249)
- RF-antenner(12319)
- RF forstærkere(19651)
- Balun(1496)
- attenuatorer(4852)
Relevant producent







-
Optoelektronik
Optoelektronik
- Optomechanical(480)
- Belysningsarmaturer(125)
- Laserdioder, lasermoduler - Laserlevering, laserfibre(345)
- Hene lasersystemer(31)
- Hene laserhoveder(27)
- Vis baggrundslys(93)
- Xenon Lighting(387)
- Touch Screen Overlays(453)
- Panelindikatorer, Pilotlys(75729)
- Optik - Remote Phosphor Light Source(269)
- Optik - Reflektorer(665)
- Optik - Lysrør(5384)
- Optik - Objektiver(4951)
- LED'er - Spacers, Standoffs(2718)
- LED'er - Lampeskift(29718)
- LED'er - Circuit Board -indikatorer, arrays, lysstænger, søjlediagrammer(9083)
- LED termiske produkter(667)
- LED Belysningssæt(64)
- LED Belysning - Hvid(37580)
- LED Belysning - Farve(4728)
- LED Belysning - COB'er, Motorer, Moduler(28735)
- LED Indikation - Diskret(27601)
- Laser Dioder, Moduler(1553)
- Lamper - Incandescents, Neons(311004)
- Lamper - Cold Cathode Fluorescerende (CCFL) & amp;UV(164)
- Inverters(7728)
- Infrarød, UV, synlige emittere(3871)
- Fiberoptik - sendere - Drivkredsløb integreret(4085)
- Fiberoptik - Sendere - Diskret(350)
- Fiberoptik - Transceiver Moduler(18758)
- Fiberoptik - switches, multiplexers, demultiplexers(1387)
- Fiberoptik - Modtagere(695)
- Fiberoptik - dæmpere(654)
- Electroluminescent(102)
- Display, Monitor - Interface Controller(98)
- Display Moduler - Vakuum Fluorescerende (VFD)(249)
- Display Moduler - LED Dot Matrix og Cluster(865)
- Display Moduler - LED Tegn og Numerisk(5421)
- Display Moduler - LCD, OLED, Grafisk(4654)
- Display Moduler - LCD, OLED Tegn og Numerisk(2202)
- Skærmbjælker, linser(88)
- Adressable, Specialitet(458)
Relevant producent







-
Sensorer, Transducere
Sensorer, Transducere
- Ultralydsmodtagere, sendere - industrielle(115)
- Temperatursensorer - termostater - mekanisk - industriel(3103)
- Temperatursensorer - Analog og digital output - Industriel(209)
- Nærhedssensorer - industrielle(13611)
- Tryksensorer, transducere - industrielle(26503)
- Optiske sensorer - Fotonik - Tællere, detektorer, SPCM (enkelt fotonoptællingsmodul)(751)
- Optiske sensorer - kameramoduler(875)
- Magnetiske sensorer - position, nærhed, hastighed (moduler) - industriel(554)
- Kraftsensorer - industriel(346)
- Flowsensorer - Industriel(151)
- Float, niveau sensorer - industriel(310)
- Kodere - Industrial(4980)
- Farvesensorer - industriel(50)
- Berør sensorer(100)
- Ultralydsmodtagere, Transmittere(2421)
- Temperaturføler - Termostater - Solid State(1096)
- Temperaturføler - Termostater - Mekanisk(3397)
- Temperatursensorer - termoelementer, temperaturprober(1921)
- Temperatursensorer - RTD (Resistens Temperaturdetektor)(1525)
- Temperatur sensorer - PTC termistorer(2273)
- Temperatur sensorer - NTC termistorer(13259)
- Temperaturføler - Analog og digital udgang(3928)
- Strain Gauges(1399)
- Specialiserede sensorer(1861)
- Solceller(503)
- Stødsensorer(84)
- Sensor Interface - Junction Blocks(2519)
- Sensorkabel - Samlinger(22011)
- Nærhed / belysningssensorer - Færdige enheder(725)
- Nærhedsfølere(2860)
- Tryksensorer, transducere(11317)
- Positionssensorer - vinkel, lineær positionsmåling(6022)
- Optiske sensorer - Reflekterende - Logisk udgang(194)
- Optiske sensorer - Reflekterende - Analog udgang(432)
- Optiske sensorer - Fototransistorer(1027)
- Optiske sensorer - PhotoInterrupters - Slot Type - Transistor output(1427)
- Optiske sensorer - PhotoInterrupters - Slot Type - Logic output(1215)
- Optiske sensorer - Fotoelektriske, industrielle(16763)
- Optiske sensorer - fotodioder(1543)
- Optiske sensorer - fotodetektorer - fjernmodtager(2605)
- Optiske sensorer - Foto Detektorer - Logic Output(146)
- Optiske sensorer - Foto Detektorer - CdS celler(74)
- Optiske sensorer - Afstandsmåling(377)
- Optiske sensorer - Ambient Light, IR, UV Sensorer(1305)
- Multifunktions(558)
- Bevægelsessensorer - Vibration(337)
- Bevægelsessensorer - Tilt Switches(67)
- Bevægelsessensorer - Optisk(719)
- Bevægelsessensorer - Inclinometre(175)
- Bevægelsessensorer - IMU'er (inertimåleenheder)(416)
- Bevægelsessensorer - Gyroskoper(214)
- Bevægelsessensorer - Accelerometre(1911)
- Magneter - Sensor Matchet(119)
- Magneter - Multi Purpose(1965)
- Magnetiske sensorer - Switches (Solid State)(3700)
- Magnetiske sensorer - position, nærhed, hastighed (moduler)(5199)
- Magnetiske sensorer - Lineære, Kompas (IC'er)(1247)
- Magnetiske sensorer - kompas, magnetfelt (moduler)(35)
- LVDT -transducere (lineær variabel differentiel transformer)(204)
- IrDA Transceiver Moduler(196)
- Billedsensorer, kamera(2235)
- Fugtighed, fugt sensorer(1425)
- Gas sensorer(1217)
- Force sensorer(188)
- Flowsensorer(550)
- Float, Level Sensors(1343)
- encodere(6357)
- Støvsensorer(43)
- Aktuelle transducere(3455)
- Farvesensorer(85)
- Forstærkere(1905)
Relevant producent







-
Tilslutninger, sammenkoblinger
Tilslutninger, sammenkoblinger
- USB, DVI, HDMI -stik(446)
- Solid State Lighting Connectors(555)
- Stikkontakter til ICS, transistorer(953)
- Pluggbare stik(1221)
- Fotovoltaiske (solcellepanel) stik(136)
- Fiberoptiske stik(370)
- FFC, FPC (flad fleksible) stik(761)
- D-SUB, D-formede stik(2887)
- Coaxial Connectors (RF)(2389)
- Cirkulære stik(14162)
- Blade Type Power Connectors(273)
- Stik og beholdere(2597)
- USB, DVI, HDMI-stik - Adaptere(572)
- USB, DVI, HDMI -stik(4298)
- Terminaler - Wire to Board-stik(217)
- Terminaler - Wire Splice Connectors(4322)
- Terminaler - Wire Pin Connectors(328)
- Terminaler - Turret Connectors(1273)
- Terminaler - Specialiserede stik(2042)
- Terminaler - Spade-stik(3902)
- Terminaler - Lyddæmper(345)
- Terminaler - Skruekoblinger(745)
- Terminaler - Ringstik(12596)
- Terminaler - Rektangulære stik(4747)
- Terminaler - Hurtige forbindelser, hurtige afbrydelsesstik(8514)
- Terminaler - PC Pin, Single Post Connectors(3776)
- Terminaler - PC Pin Holdere, Stikkontakter(5883)
- Terminaler - Magnetiske ledningsstik(1653)
- Terminaler - Knivkontakter(112)
- Terminaler - Huse, Støvler(2850)
- Terminaler - Folie Connectors(108)
- Terminaler - Barrel, Bullet Connectors(1107)
- Terminaler - Adaptere(137)
- Terminal Strips og Turret Boards(1159)
- Terminal Junction Systems(2533)
- Terminalblokke - Wire to Board(43615)
- Terminalblokke - Specialiseret(3722)
- Terminalblokke - Strømfordeling(847)
- Terminalblokke - Panelmontering(1359)
- Terminalblokke - Interface Moduler(1819)
- Terminalblokke - Headers, stik og stikkontakter(119920)
- Terminalblokke - Din Rail, Channel(9373)
- Terminalblokke - Kontakter(65)
- Terminal blokke - Barrier Blocks(47517)
- Terminalblokke - Adaptere(1059)
- Solid State Lighting Connectors - Kontakter(271)
- Solid State Lighting Connectors(1344)
- Stikkontakter til IC'er, Transistorer - Adaptere(275)
- Stikkontakter til ICS, transistorer(22148)
- Shunts, Jumpers(907)
- Rektangulære stik - fjederbelastet(7721)
- Rektangulære stik - Huse(43023)
- Rektangulære stik - Headers, Special Pin(6129)
- Rektangulære stik - overskrifter, beholdere, kvindelige stikkontakter(229601)
- Rektangulære stik - Headers, Male Pins(543338)
- Rektangulære stik - gratis hængende, panelmontering(30142)
- Rektangulære stik - kontakter(10681)
- Rektangulære stik - bord i, direkte ledning til bord(2432)
- Rektangulære stik - Adaptere(475)
- Rektangulær - Board to -brætstik - overskrifter, beholdere, kvindelige stikkontakter(9)
- Rektangulær - Board to -brætstik - overskrifter, mandlige stifter(2)
- Rektangulære stik - bordafstandsstykker, stablere (bord til bord)(238901)
- Rektangulære stik - arrays, kanttype, mezzanin (bord til bord)(37853)
- Strømindgangsstik - indgange, udgange, moduler(10310)
- Pluggbare stik(6049)
- Photovoltaic (Solar Panel) stik - kontakter(77)
- Fotovoltaiske (solcellepanel) stik(504)
- Modulære stik - ledningsblokke(99)
- Modulære stik - stik(1674)
- Modulære stik - stikkabinetter(181)
- Modulære stik - Jacks With Magnetics(10152)
- Modulære stik - Jacks(23416)
- Modulære stik - Adaptere(855)
- Memory Connectors - PC Kort - Adaptere(21)
- Memory Connectors - PC Card Sockets(3299)
- Memory Connectors - Inline Module Sockets(3390)
- LGH-stik(764)
- Keystone - indsatser(2758)
- Keystone - Faceplates, Frames(1926)
- Heavy Duty-stik - indsatser, moduler(4190)
- Heavy Duty Connectors - Huse, Hætter, Baser(17226)
- Heavy Duty Connectors - Rammer(523)
- Heavy Duty Connectors - Kontakter(1832)
- Heavy Duty Connectors - Assemblies(671)
- Fiberoptiske stik - Huse(919)
- Fiberoptiske stik - Adaptere(4455)
- Fiberoptiske stik(3001)
- FFC, FPC (Flat Flexible) Tilslutninger - Huse(652)
- FFC, FPC (Flat Flexible) stik - kontakter(202)
- FFC, FPC (flad fleksible) stik(18691)
- D-Sub, D-Shaped Connectors - Terminatorer(47)
- D-Sub, D-formede stik - Huse(12238)
- D-Sub, D-Shaped Connectors - Kontakter(2714)
- D-Sub, D-formede stik - Backshells, Hoods(5995)
- D-Sub, D-formede stik - Adaptere(1304)
- D-Sub-stik(141346)
- D-formede stik - Centronics(8770)
- Kontakter, fjederbelastet og tryk(630)
- Kontakter - Multi Purpose(6196)
- Kontakter - Leadframe(122)
- Koaksialkontakter (RF) - Terminatorer(1231)
- Koaksialkontakter (RF) - Kontakter(480)
- Koaksiale stik (RF) - Adaptere(6386)
- Coaxial Connectors (RF)(25734)
- Cirkulære stik - Huse(441226)
- Cirkulære stik - kontakter(4737)
- Cirkulære stik - Backshells og kabelklemmer(53692)
- Cirkulære stik - Adaptere(8839)
- Cirkulære stik(1196254)
- Card Edge Connectors - Huse(469)
- Card Edge Connectors - Edgeboard-stik(672683)
- Card Edge Connectors - Kontakter(325)
- Card Edge Connectors - Adaptere(73)
- Blade Type Power Connectors - Huse(837)
- Blade Type Power Connectors - Kontakter(393)
- Blade Type Power Connectors(4163)
- Mellem serie adaptere(649)
- Tønde - Strømforbindelser(935)
- Tønde - Audio-stik(2432)
- Tønde - Lydadaptere(92)
- Banan og Tip Connectors - Jacks, stik(1644)
- Banan- og tipkontakter - bindende indlæg(239)
- Banan- og Tip-stik - Adaptere(75)
- Backplane Connectors - Specialiseret(45586)
- Backplane Connectors - Huse(6863)
- Backplane Connectors - Hård Metrisk, Standard(6297)
- Backplane-stik - DIN 41612(9408)
- Backplane Connectors - Kontakter(3583)
- Backplane Connectors - ARINC Inserts(2357)
- Backplane Connectors - ARINC(3789)
Relevant producent







-
modstande
-
kondensatorer
kondensatorer
- Aluminiumelektrolytkondensatorer(16817)
- Trimmere, Variable Kondensatorer(3151)
- Tynde filmkondensatorer(3473)
- Tantalkondensatorer(136103)
- Tantal - Polymerkondensatorer(9778)
- Silicon kondensatorer(320)
- Niobiumoxidkondensatorer(330)
- Glimmer og PTFE kondensatorer(9101)
- Filmkondensatorer(150406)
- Elektriske dobbeltlags kondensatorer (EDLC), superkapacitorer(2782)
- Keramiske kondensatorer(833829)
- Capacitor Networks, Arrays(2383)
- Aluminiumelektrolytkondensatorer(125325)
- Aluminium - Polymerkondensatorer(7544)
Relevant producent






-
transformers
-
isolatorer
-
Krystaller, oscillatorer, resonatorer
-
Skifter
Skifter
- Samlåsekontakter(2893)
- Emergency Stop (E-STOP) switches(1160)
- Kabelstikkontakter(571)
- Toggle Switches(33608)
- Thumbwheel Switches(742)
- Taktile kontakter(14263)
- Snap Action, Limit Switches(28077)
- Slide Switches(5166)
- Vælgerkontakter(9720)
- Rotary Switches(13850)
- Rocker Switches(53790)
- Pushbutton Switches - Hall Effect(127)
- Trykknapper(190826)
- Programmerbare skærmkontakter(39)
- Navigationsafbrydere, joystick(1882)
- Magnetiske, Reed Switches(1399)
- Tastaturkontakter(637)
- Tastelåsskiftere(3684)
- DIP-switche(7747)
- Konfigurerbare Switch Komponenter - Lens(1435)
- Konfigurerbare switchkomponenter - belysningskilde(1236)
- Konfigurerbare switch komponenter - Kontakt blok(1401)
- Konfigurerbare Switch Komponenter - Body(16077)
- Afbryd forbindelseskomponenterne(2567)
Relevant producent






-
Relæer
Relæer
- Sikkerhedsrelæer(1310)
- Reed Relays(1735)
- Højfrekvente (RF) relæer(1190)
- Contactors (Solid State)(686)
- Kontaktorer (Elektromekaniske)(11952)
- Automotive Relæer(1881)
- Solid State Relæer(10652)
- Signalrelæer, op til 2 ampere(9149)
- Relæ Sockets(2075)
- Power relæer, over 2 ampere(31604)
- I / O-relæmoduler(712)
- I / O-relæmoduler - Input(2)
- I / O-relæmodulstativ(247)
Relevant producent





























Vælg sprog
Nuværende sprog
Dansk
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
MG995 Servo Motor Control Guide: PWM, ledninger og kodeeksempel
Tid: 2026-04-17
Gennemse: 54
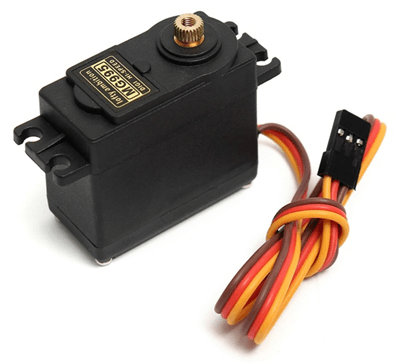
MG995 servomotoren er kendt for sin evne til at levere højt drejningsmoment og præcis vinkelpositionering.Med sin metalgearkonstruktion og PWM-baserede kontrol tilbyder MG995 en balance mellem styrke, nøjagtighed og nem integration med mikrocontrollere.Denne artikel vil diskutere MG995 servomotoren, herunder dens struktur, funktioner, arbejdsprincip, ledninger, kontrolmetoder, fejlfinding og lignende servomotor sammenligninger.
Katalog
Hvad er MG995 servomotor?
Den MG995 servomotor er en servo i standardstørrelse med højt drejningsmoment designet til præcis vinkelpositionskontrol.Den fungerer inden for et typisk område på 0° til 180°, ved hjælp af et PWM-signal (Pulse Width Modulation) til at styre dens bevægelse.Dette gør det muligt for motoren at konvertere elektrisk input til nøjagtig mekanisk rotation.
Bygget med metalgear giver MG995 forbedret holdbarhed og styrke sammenlignet med plastgearservoer.Den fungerer normalt ved 4,8V til 6,6V og kan levere et drejningsmoment i området omkring 9-13 kg·cm, hvilket gør den velegnet til opgaver, der kræver stabil og kraftfuld bevægelse.
MG995 servomotorstruktur
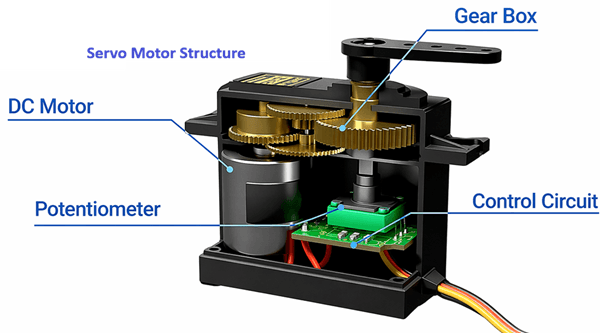
DC motor
DC-motoren er den vigtigste drivkomponent inde i MG995 servomotoren.Det omdanner elektrisk energi til rotationsbevægelse.Men motoren alene drejer ved høj hastighed med lavt drejningsmoment, så den kan ikke direkte styre positionen.I stedet arbejder den sammen med andre indre dele for at opnå kontrolleret bevægelse.Motoren reagerer på signaler fra styrekredsløbet og roterer i den ønskede retning for at nå den ønskede position.
Gearkasse (metalgear)
Gearkassen består af flere metalgear, der reducerer DC-motorens hastighed og øger momentet.Dette er en nøglefunktion ved MG995, da metalgear giver højere styrke, holdbarhed og lasthåndteringsevne sammenlignet med plastgear.Gearreduktionen gør det muligt for servoen at bevæge sig mere præcist og holde sin position under belastning uden at glide.
Potentiometer (positionsfeedback)
Potentiometeret fungerer som en feedbacksensor, der kontinuerligt måler positionen af udgangsakslen.Den sender positionsdata i realtid til styrekredsløbet.Denne feedback er essentiel for drift med lukket sløjfe, hvilket gør det muligt for servoen nøjagtigt at nå og opretholde den beordrede vinkel.
Kontrolkredsløb
Styrekredsløbet er servomotorens "hjerne".Den modtager PWM-signalet fra en controller og sammenligner den ønskede position med den faktiske position fra potentiometeret.Baseret på denne sammenligning justerer den motorens rotation, indtil den korrekte position er opnået.Dette sikrer stabil og præcis kontrol.
Udgangsaksel
Udgangsakslen er den del af servoen, der leverer mekanisk bevægelse til eksterne komponenter.Den er forbundet til gearkassen og roterer inden for et begrænset område, typisk op til 180°.Skaftet er designet til at holde tilbehør såsom servohorn, hvilket muliggør kontrolleret bevægelsesoverførsel.
Servohus
Huset omslutter og beskytter alle indvendige komponenter.Det giver strukturel støtte og sikrer korrekt justering af motor, gear og elektronik.I MG995 er huset designet til at modstå mekanisk belastning og opretholde stabilitet under drift.
MG995 servomotor Nøglefunktioner og specifikationer
• Højt drejningsmoment: ca. 9–13 kg·cm afhængig af driftsspænding
• Holdbar metalgearkonstruktion for forbedret styrke og længere levetid
• Driftsspændingsområde: 4,8V til 6,6V
• Rotationsområde: typisk op til 180° for præcis positionskontrol
• Kontrolmetode: PWM (Pulse Width Modulation) signalindgang
• Hastighed: ca. 0,16–0,20 sek./60° rotation
• Standard 3-leder interface (VCC, GND, Signal) for nem tilslutning
• Dobbelt kuglelejedesign for jævnere og mere stabil bevægelse
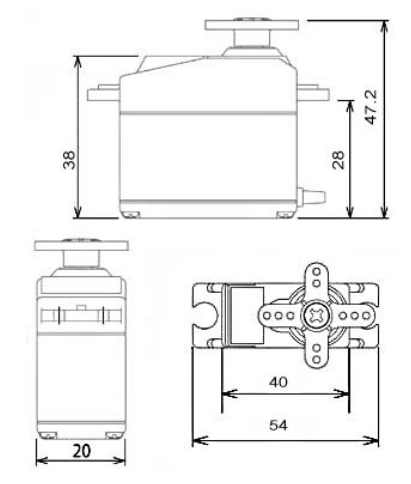
• Dimensioner: cirka 40 × 20 × 43 mm
• Vægt: omkring 55–60 gram
• Højt strømforbrug under belastning, hvilket kræver en stabil ekstern strømkilde
• Stærkt holdemoment for at opretholde position under mekanisk belastning
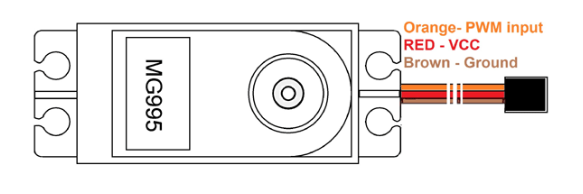
MG995 servomotor pinout og ledningsdetaljer
|
Pin
/ Trådfarve |
Navn |
Beskrivelse |
Typisk
Forbindelse |
|
Orange (eller
gul) |
PWM signal |
Modtager kontrol
signal (PWM) for at indstille servopositionen (vinkel) |
Mikrocontroller
PWM pin (f.eks. Arduino digital pin) |
|
Rød |
VCC (Power) |
Forsyner strøm
til servomotoren (typisk 4,8V–6V) |
Ekstern 5V
strømforsyning |
|
Brun (eller sort) |
Jord (GND) |
Fælles grund
reference for effekt og signal |
Jord af magt
forsyning og controller |
Hvordan virker MG995 servomotoren?
MG995 servomotoren fungerer ved hjælp af et lukket sløjfe-kontrolsystem, der sikrer præcis positionskontrol.Den modtager et PWM-signal (Pulse Width Modulation) fra en controller, hvor pulsbredden bestemmer den ønskede vinkel på udgangsakslen.Typisk svarer en puls mellem 1 ms og 2 ms til positioner fra 0° til 180°.
Inde i servoen sammenligner styrekredsløbet indgangssignalet med den aktuelle position, der detekteres af potentiometeret.Hvis der er en forskel, aktiverer kredsløbet DC-motoren til at rotere i den rigtige retning.Gearkassen reducerer derefter hastigheden og øger drejningsmomentet, hvilket tillader en jævn og kontrolleret bevægelse.
Når akslen når målpositionen, svarer feedbacksignalet til inputkommandoen, og motoren stopper.Denne kontinuerlige justering gør det muligt for MG995 at opretholde nøjagtig positionering og holde sin vinkel selv under belastning.
Sådan bruges MG995-servomotoren
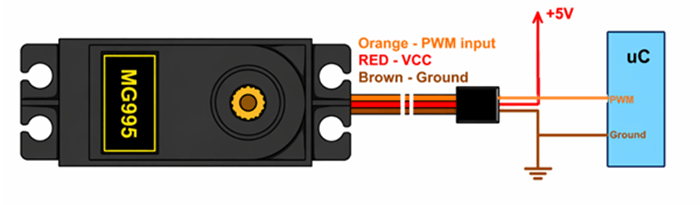
For at bruge MG995 servomotoren skal du tilslutte dens tre ledninger korrekt og give et korrekt PWM-kontrolsignal.Den røde ledning (VCC) skal forbindes til en stabil 5V strømforsyning, den brune ledning (GND) til jord og den orange ledning (signal) til en PWM-udgangspin på en mikrocontroller.Hvis du bruger en separat strømkilde til servoen, skal du altid forbinde strømforsyningens jord og controlleren sammen for at sikre korrekt signalreference.
MG995 fungerer ved hjælp af et PWM-signal med en typisk frekvens på 50Hz (20ms periode).Servoens position afhænger af pulsbredden inden for hver cyklus.En impuls omkring 1ms flytter akslen tæt på 0°, 1,5ms sætter den nær midten (90°), og omkring 2ms roterer den mod 180°.Ved at justere denne pulsbredde kan du kontrollere servoens nøjagtige position.
For stabil drift skal du bruge en ekstern strømforsyning, der er i stand til at levere tilstrækkelig strøm, da MG995 kan trække høj strøm under belastning.Mange udviklingsplatforme giver dig mulighed for nemt at styre servoen ved hjælp af indbyggede biblioteker, som forenkler generering af de nødvendige PWM-signaler.
MG995 Servomotor med Arduino: Grundlæggende kontroleksempel
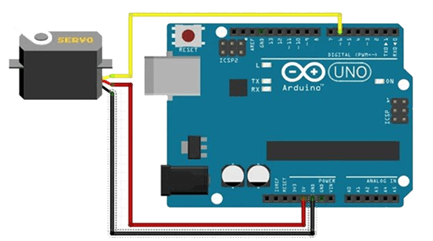
For at styre MG995 servomotoren ved hjælp af en Arduino skal du tilslutte de tre ledninger korrekt.Den røde ledning går til 5V-strømmen, den brune (eller sorte) ledning forbindes til GND, og den orange (signal) ledning forbindes til en PWM-kompatibel digital pin (såsom pin 9).For stabil ydeevne anbefales det at bruge en ekstern 5V strømforsyning og forbinde dens jord til Arduino-jorden.
Grundlæggende Arduino-kodeeksempel
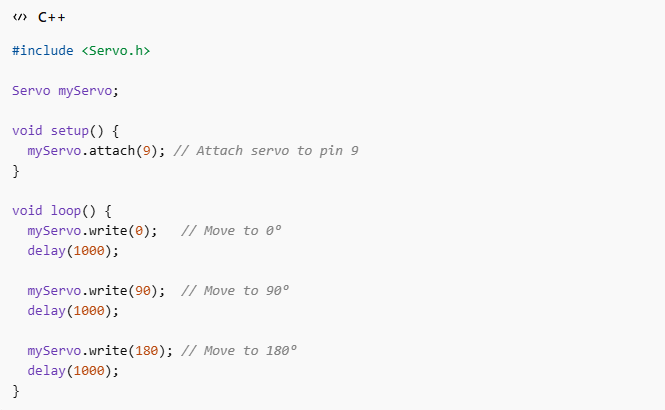
Dette enkle program flytter servoakslen mellem 0°, 90° og 180°.Servo-biblioteket genererer automatisk de korrekte PWM-signaler, hvilket gør det nemmere at styre MG995 uden manuelt at indstille pulsbredder.
Almindelige problemer og fejlfinding MG995 servomotor
|
Problem |
Muligt
Årsag |
Løsning |
|
Servoen bevæger sig ikke |
Forkert ledningsføring
eller intet PWM-signal |
Tjek VCC, GND,
og signalforbindelser;verificere PWM-output fra controlleren |
|
Servo ryster
eller ryster |
Ustabil eller
utilstrækkelig kraft |
Brug en stald
ekstern 5V forsyning og tilslut alle jordforbindelser sammen |
|
Overophedning |
Overbelastning el
forkert spænding |
Reducer belastning og
sørg for, at spændingen er inden for 4,8V–6,6V område |
|
Begrænset eller
forkert rotation |
Forkert PWM-signal
eller pulsbredde |
Juster PWM
timing eller brug et pålideligt servokontrolbibliotek |
|
Støjende drift |
Gear stress eller
mekanisk modstand |
Reducer belastning og
kontrollere for forhindringer eller slid på gear |
|
Pludselig nulstilling eller
strømfald |
Høj strøm
træk, der forårsager spændingsfald |
Brug en højere
nuværende strømforsyning og undgå strøm fra MCU direkte |
|
Svagt hold
drejningsmoment |
Utilstrækkelig
strøm eller for stor belastning |
Sørg for tilstrækkelig
kraft og reducere mekanisk belastning |
MG995 Lignende servomotorer
|
Feature |
MG996R
Servo motor |
DS3218
Digital Servo |
MG90S
Metal Gear Servo |
SG90
Mikro Servo |
|
Kontroltype |
Analog/Digital |
Digital |
Analog |
Analog |
|
Moment |
~11-13 kg·cm |
~20 kg·cm |
~2–2,5 kg·cm |
~1,8 kg·cm |
|
Gear Type |
Metal (forbedret) |
Metal |
Metal |
Plast |
|
Størrelse |
Standard |
Større |
Mikro |
Mikro |
|
Hastighed |
Lidt hurtigere |
Hurtigt |
Moderat |
Moderat |
|
Nøjagtighed |
Højere |
Høj |
Godt |
Grundlæggende |
|
Strøm
Krav |
Medium-Høj |
Høj |
Lav |
Lav |
|
Holdbarhed |
Bedre |
Meget høj |
Godt |
Moderat |
|
Vægt |
~55-60g |
Tyngre |
~13 g |
~9g |
|
Bedste brugsniveau |
Opgraderingsmulighed |
Kraftig |
Kompakte projekter |
Letvægts brug |
Anvendelse af MG995 servomotor
MG995 servomotoren er meget udbredt i systemer, der har brug for kontrolleret vinkelbevægelse og højt drejningsmoment.Den klarer sig også godt i projekter, der involverer stabil positionering og evnen til at håndtere moderate mekaniske belastninger.Dens metalgearkonstruktion understøtter pålidelig drift og ensartet bevægelsesydelse over tid.
I kontrolsystemer er MG995 ofte forbundet med mikrocontrollere for at opnå præcis positionering.Det fungerer godt i opsætninger, hvor komponenter skal flyttes til bestemte vinkler og bevare deres position.Dette gør den velegnet til automatiserede mekanismer, der er afhængige af gentagelig og nøjagtig bevægelse.
Servoen bruges også i bevægelsessystemer, der involverer synkroniseret eller gentagne bevægelser.Dens hurtige respons på PWM-signaler gør det muligt for den at følge programmerede kommandoer uden problemer.På grund af dette vælges det ofte til design, der kræver koordineret mekanisk bevægelse.
Anvendelsesområde:
• Robotsystemer
• Robotarme
• Fjernstyrede køretøjer (biler, både, fly)
• Kamera panorerings- og vippesystemer
• Automationssystemer
• CNC- og gør-det-selv-maskiner
• Mekaniske koblinger og aktuatorer
• Uddannelses- og ingeniørprojekter
• Bevægelseskontrolsystemer
• Smart home mekanismer
MG995 Servomotor mekaniske dimensioner
Konklusion
Ved at forstå MG995-servomotorspecifikationerne, arbejdsprincippet og korrekt brug kan du opnå stabil ydeevne, mens du undgår almindelige problemer såsom rystelser eller strømustabilitet.Sammenligning med lignende servomotorer hjælper også med at vælge den bedst egnede mulighed baseret på ydeevnebehov.MG995 står som et pålideligt og omkostningseffektivt valg til motion control-systemer, der kræver både styrke og præcision.
Ofte stillede spørgsmål [FAQ]
1. Hvilken spænding er bedst for MG995 servomotorens ydeevne?
En spænding på 5V til 6V anbefales.Brug af 6V giver typisk højere drejningsmoment og bedre reaktionsevne.
2. Hvor meget strøm trækker MG995 servomotoren?
Den kan trække 500mA til over 1A under belastning, så en dedikeret strømforsyning anbefales.
3. Kan MG995 rotere kontinuerligt (360°)?
Nej, det er en standard positionsservo begrænset til omkring 180°.Kontinuerlig rotation kræver modifikation.
4. Hvorfor ryster min MG995 servomotor selv uden belastning?
Dette skyldes ofte ustabile PWM-signaler eller elektrisk støj.Brug en stabil controller og korrekt jording.
5. Hvilken PWM-frekvens bruger MG995 servomotoren?
Den fungerer typisk ved 50Hz (20ms periode) for korrekt positionskontrol.
Relateret artikel
-
![Batterioplader IC Guide: Funktioner, opladningstrin og kredsløbsdesign]() Apr 17 2026Batterioplader IC Guide: Funktioner, opladningstrin og kredsløbsdesign
Apr 17 2026Batterioplader IC Guide: Funktioner, opladningstrin og kredsløbsdesignBatterioplader IC'er er ansvarlige for at sikre sikker, effektiv og pålidelig batteriopladning.Efterhånden som enheder bliver mere kompakte, og str...

relaterede produkter

CGB2A3X5R0J105M033BB
CAP CER 1UF 6.3V X5R 0402
C4532X7R2A225M230KA
CAP CER 2.2UF 100V X7R 1812

SI5341B-D-GM
IC JITTER ATTENUATOR/MULTIPLEXER

SST89E516RD2-40-I-NJE
IC MCU 8BIT 72KB FLASH 44PLCC

VI-J43-IZ
DC DC CONVERTER 24V 25W

7MBP150RP060
IGBT Modules

HA16621MPEL
HA16621MPEL RENESAS

UDA1360TS/N1
UDA1360TS/N1 PHILIP
BIT1615G
BITEK LQFP-64
ICS950403CFT
ICS950403CFT ICS

S29GL128N11TA100
S29GL128N11TA100 SPANSION

SC415012CGC
SC415012CGC MOT
